My projects
Presenting at IROS!
I gave an oral presentation and presented a poster at IROS 2023 in Detriot about the perturbation system we built and the experiment we have done.


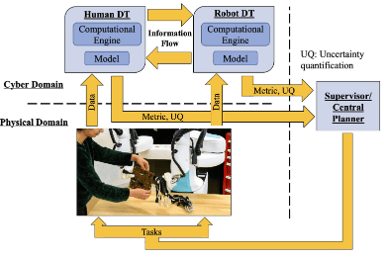
Human-Robot Collaboration Digital Twin for Fatigue Evaluation in Manufacturing
This project develops a hardware system to study human fatigue in collaborative cable assembly tasks with a Kawasaki duAro robot. The system ensures task consistency and safety while simulating real-world manufacturing conditions. It allows workers to collaborate with digital virtual coworkers, testing whether this approach can lead to higher overall productivity.
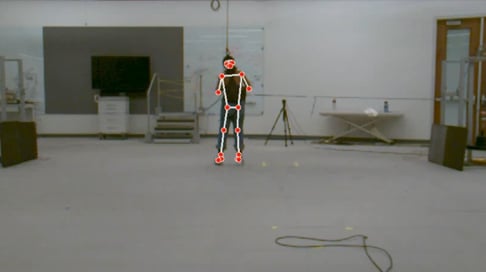
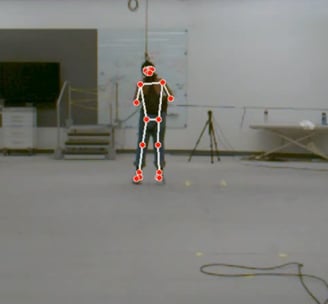
Assessing the role of socket trim line on reactive balance in people with transfemoral amputation
This study will determine if socket trim line affects the ability to utilize hip musculature and thus how people with transfemoral amputations respond to destabilizing forces.


Assessing balance recovery after discrete perturbations in individuals with lower limb amputation: a systematic review
To be submitted to Gait & Posture.
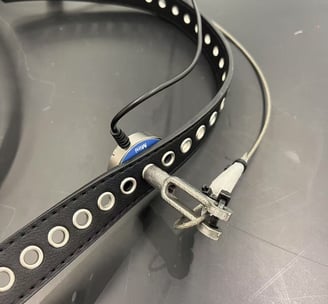
On-going self-project: changing wire-connected Load Cell to wireless ones
The old load cell in our lab has a limited capture rate of only 100Hz and requires a long wire to connect to the computer. This setup creates several issues, including the wire lying across the floor, posing safety hazards and the risk of tripping participants. To address these concerns, I aim to upgrade to a wireless load cell system with a higher capture rate of at least 1000Hz. As the company's solution costs $499, I plan to implement this using a Raspberry Pi to achieve a more cost-effective and efficient setup.

To be Updated.


Critical Care Robotics for Endotracheal Intubation
Designed and developed a hand-held robotic intubation device with advanced vision integration and precise motion control to enhance guidance for healthcare providers, improving accessibility and success rates in endotracheal intubation.


proprietary information


Rescue Drone
This project proposes a fixed-wing UAV that applies image recognition technology for fast and precise item delivery. Cooperating with immediate identification, this UAV can deliver objects to the goal according to its number and location. This UVA could be used to deliver much-needed supplies such as bread and cup noodles to disaster-hit areas, express delivery during quarantine, or T-shirt delivery at major sporting events. With our project, emergency rescues will be much timelier and more effective.


Quadruped Vehicle Powered by Only One Motor
We designed a 4-leg quadruped vehicle and the linkage system that offers mobilities on various types of terrains, with only one motor. Used 3D printing and laser cutter to manufacture the parts of the prototype. Analyzed and adjusted the assembly to pass the straight-line and speed-racing tests.


Gait Rehabilitation Training Device
We designed a gait rehabilitation training Device with a human walking gait circle. This design could help people rehabilitate with a higher efficienci.


To be Updated.
Course projects: Locomotor Mehcnics and Deisgn / Control of Wearable Robotic Systems
We designed a prosthesis to help with hiking. -- Prothesis could work with uneven terrain; A course project and did not come to reality.


To be Updated.