Assessing the role of socket trim line on reactive balance in people with transfemoral amputation
This study will determine if socket trim line affects the ability to utilize hip musculature and thus how people with transfemoral amputations respond to destabilizing forces.
RESEARCH
Boer Chen
8/19/20235 min read
I. Motivation
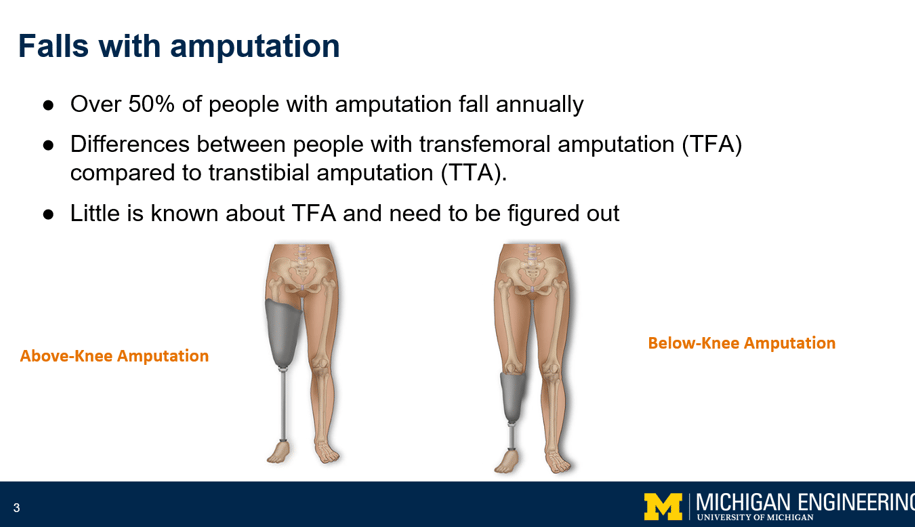
Limited research exists on Transfemoral Amputations (TFA) fall risk factors, including socket trimline effects. Fall prevention for people with TFA relies heavily on the prosthetic componentry underneath them coupled with the strength and coordination of their remaining hip musculature [1]. A reliable perturbation system is crucial for measurement.
II. Problem statement
Precise methods for force application initiating perturbations for people with TFA are lacking. Existing approaches lack precision, require time-consuming adjustments to alter force magnitude, and disrupt natural motion [2] [3]. Unilateral force direction and participant-specific targeting require further exploration [2]. Therefore, we hypothesize that the amount the socket encompasses the residual hip musculature, specifically the socket trim line height, affects the engagement of these muscles, potentially impacting fall prevention.
III. Methods
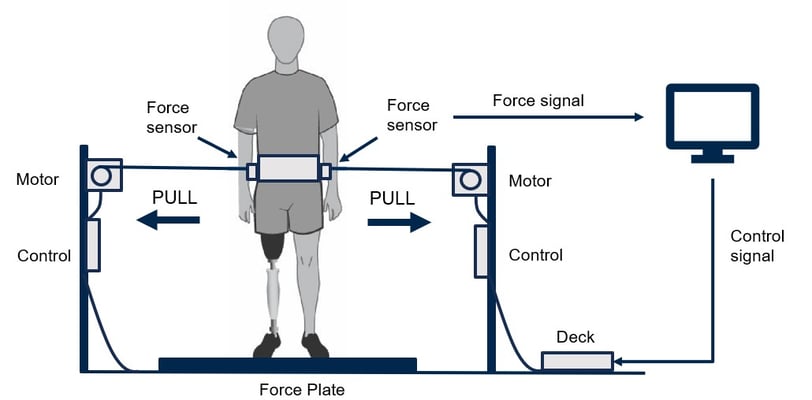
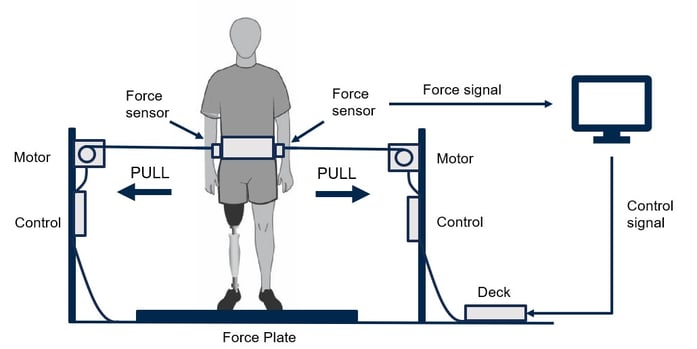
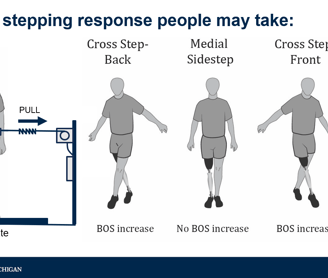
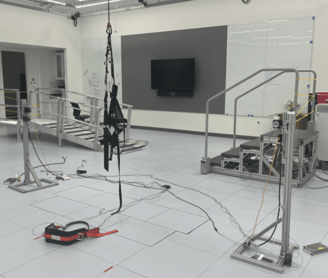
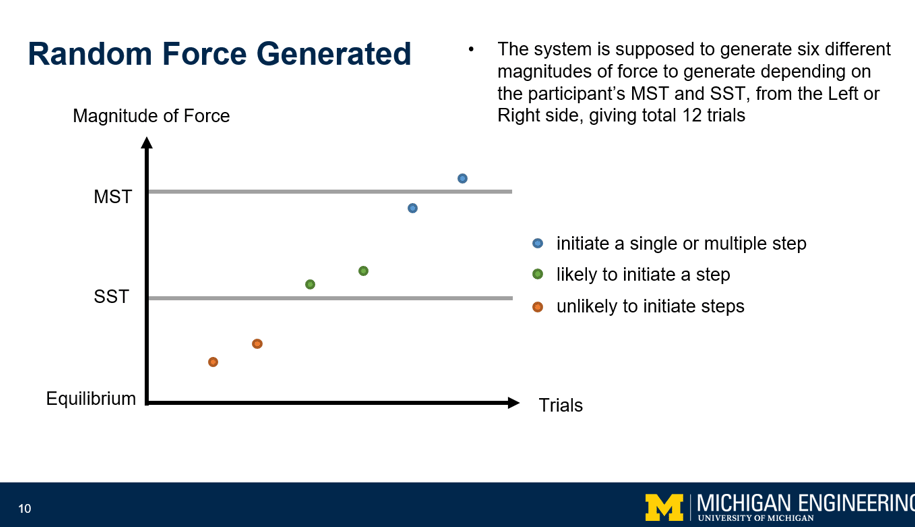
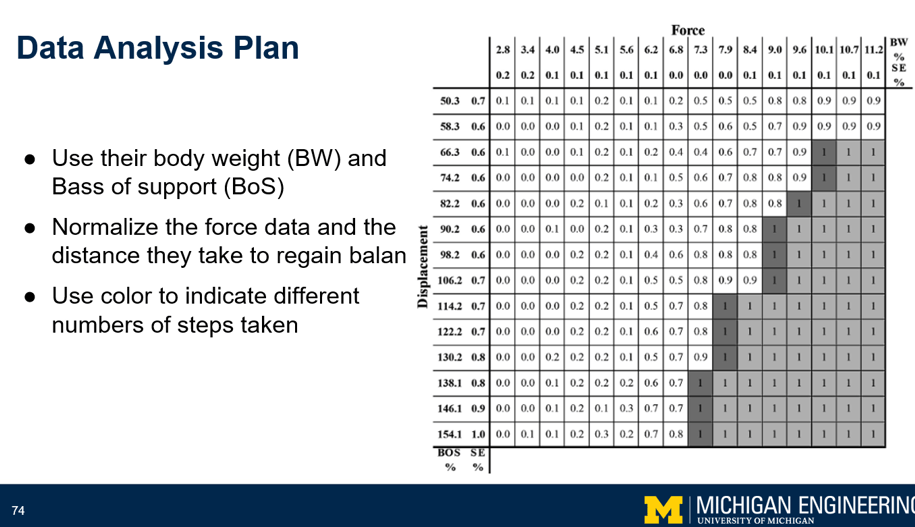
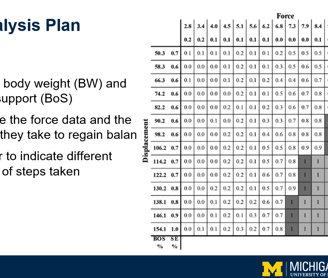
We developed a perturbation system (Fig. 1) to apply controlled mediolateral directed forces specified to participant characteristics, including waist height, body weight, and width of their base of support (BoS). Incremental force levels were progressively increased to identify single step and multiple step destabilization thresholds. Six randomized percentages above and below these stepping thresholds were chosen for both the intact and residual limbs.
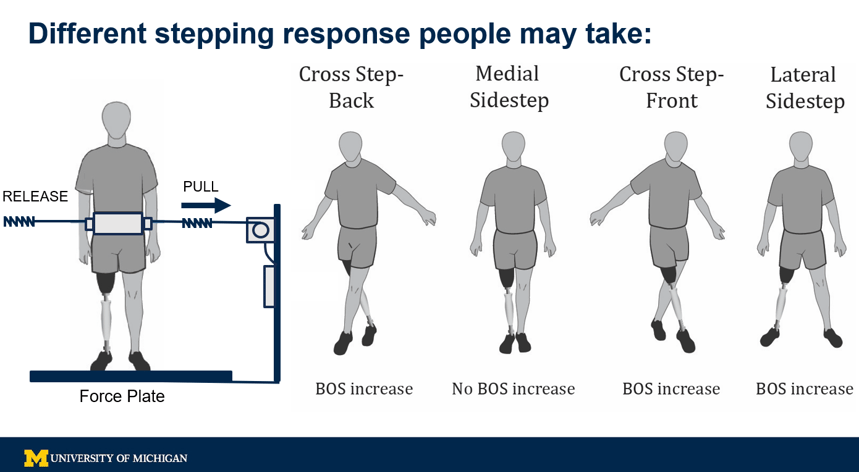
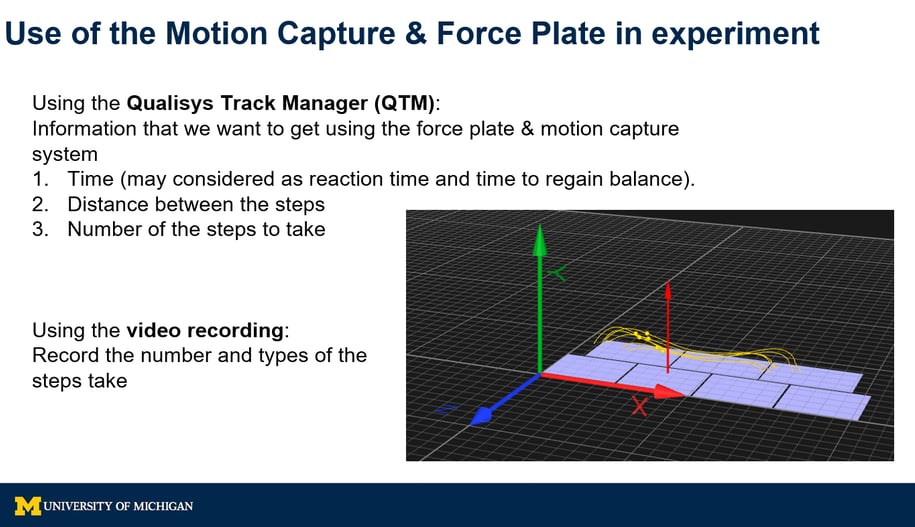
A motion capture system was integrated to capture stepping responses and in-ground force plates to define step onset through a thresholding algorithm from ankle marker positions. The center of pressure position at step onset was calculated relative to the non-stepping limb ankle and normalized to the width of BoS. Recovery duration was determined for each step response.
IV. Results
The perturbation system delivered controlled mediolateral perturbations. Motors, controlled through stepper driver and LabVIEW, work in equal and opposite directions to pull the participant, ensuring directions and magnitudes of perturbations could be randomized and blinded. A waist harness with embedded force sensors was connected to the stepper driver to read perturbation force. The force plates and waist force sensors ensured the participant reached a steady state of equal weight bearing through both limbs before the start of each perturbation. A randomization algorithm was used to control the direction and magnitude of each perturbation.
V. Discussion
This study addressed the application of accurate and specific forces to induce perturbations on individuals with TFA. Analysis of reactive stepping data explores the influence of socket trim line height on hip muscle function. This system supports future studies exploring the effects of perturbations on different planes and terrains, aiming to reduce falls and enhance the quality of life for people with TFA.
References
[1] Arifin N., et al. The Scientific World Journal, Jun. 05, 2014.
[2] Curtze C., et al. Gait & Posture,36-2, pp. 276–281, Jun. 2012.
[3] Gray V. L., et al. Journal of Neurologic Physical Therapy, 41- 4, pp. 222–228, Oct. 2017.
This project is still in progress. I am more than happy to discuss it!
What I have done:
Control and tune a open-loop motor contorl system; Set up the perturbation structure; Motion caputure analysis
The process:
We want to reach this kind of design:
The Setup we already built:

We could provide the amount of force and drive people to move!
Testing settings:
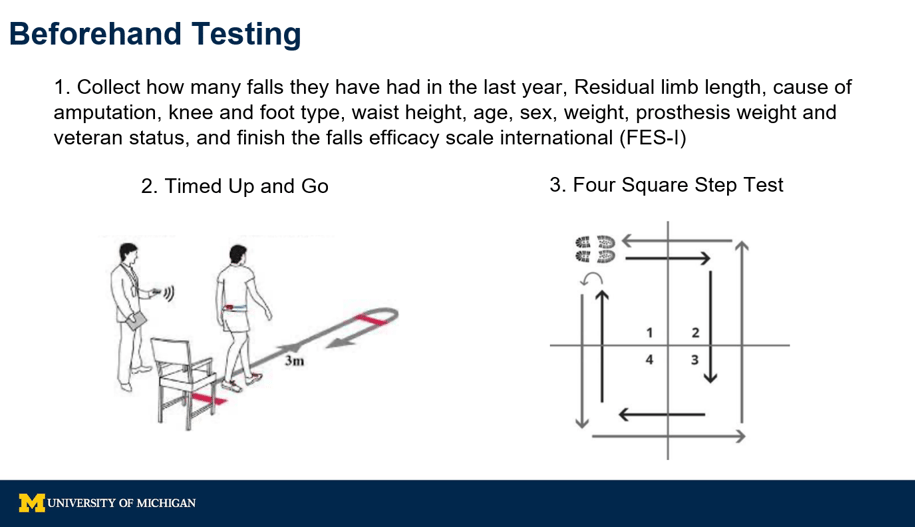
Beforehand tests:
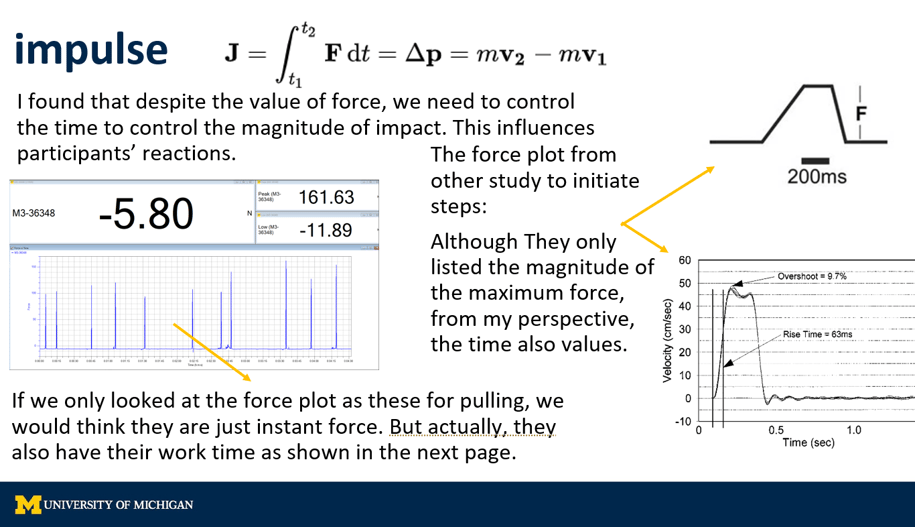
The analysis of balance control involves not only the consideration of force but also the evaluation of impact.
In my perspective, the amplitude of the force plays a pivotal role in initiating motion. Specifically, when the force surpasses the threshold of friction, individuals commence their movements. Furthermore, the timing of the force's application significantly influences the extent of movement and the trajectory individuals follow.
Please contact me for further information if you are interested in it!
Thanks for Kristin, Jackson, and Reewin's help during this summer.
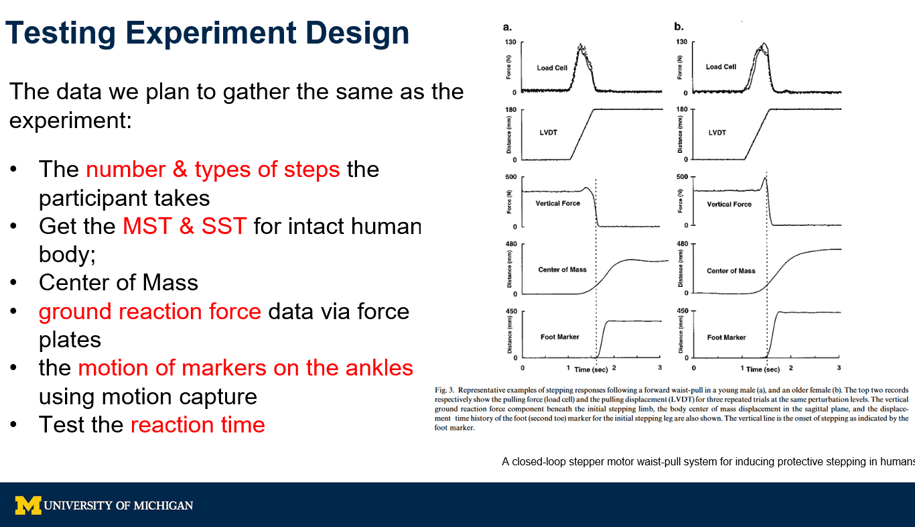
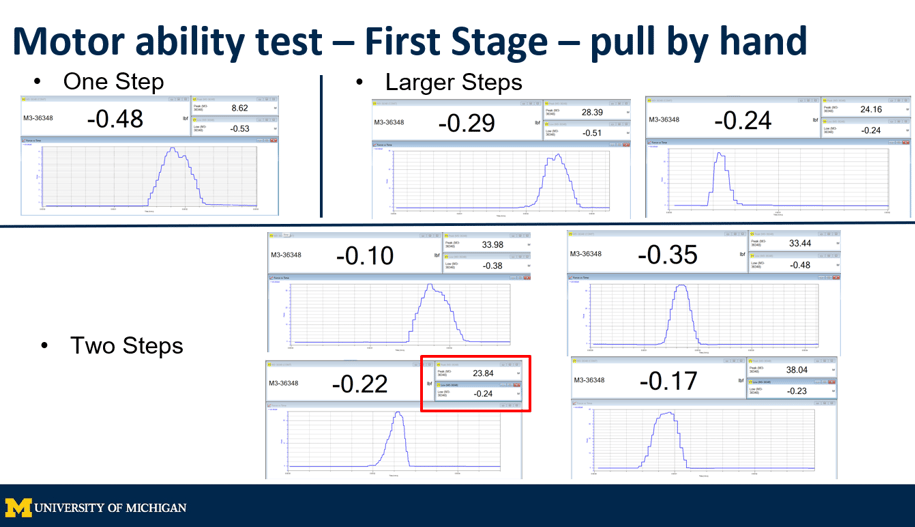
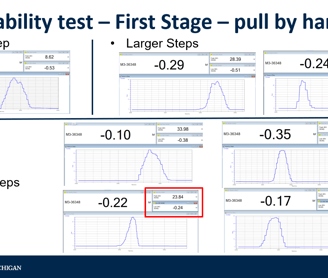
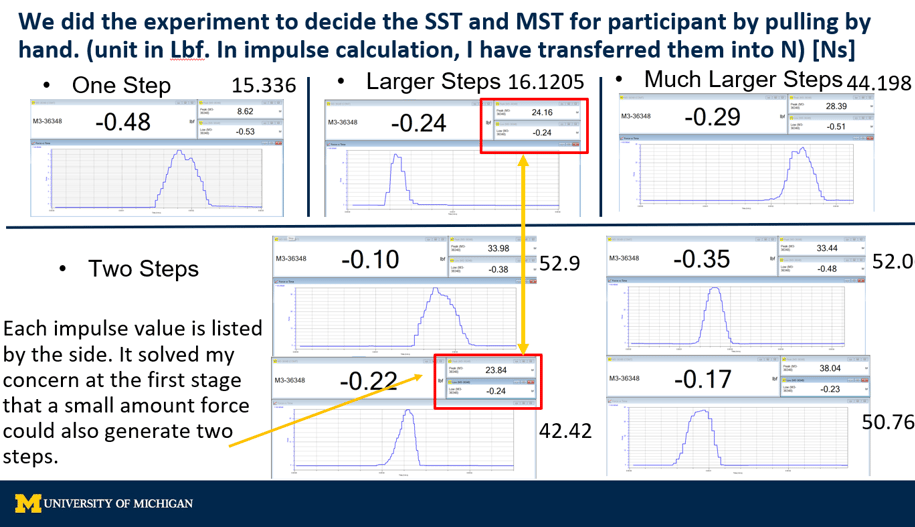
Assume The SST and MST we want to reach:
I did the tests to measure the force we want to reach by measuring (the unit in the plot is lbf). And we did the tests on intact participants. In this case, we got the amount of force "we want to reach."
However, I found that among the tests we did, one of the Two Steps force is much smaller compared to the others. This will be discussed later!!
There are millions of problems we have met!!:
I have tried to solve most of them T-T;
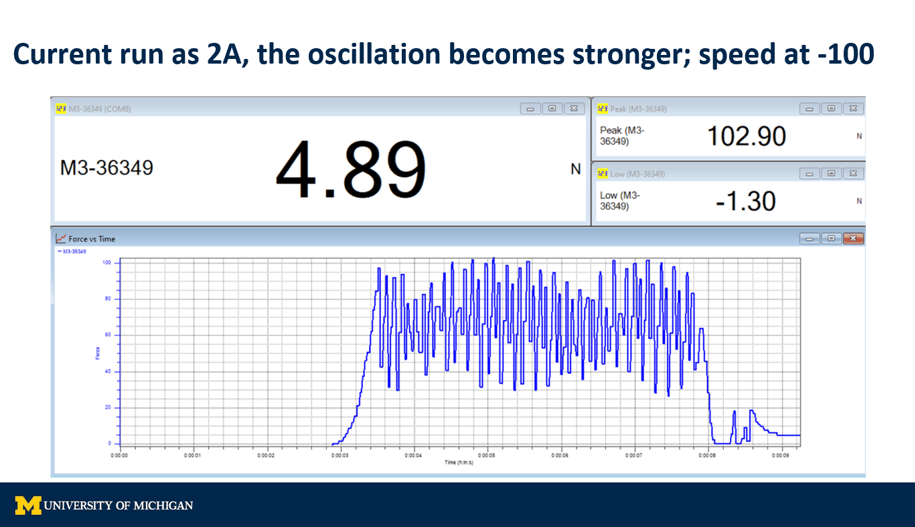
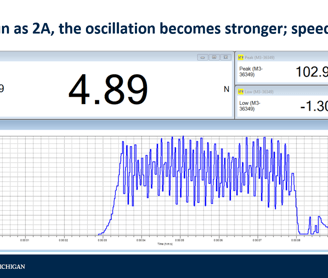
One of them I faced is that the motor is oscillating while reaching the maximum speed we set. Just as shown in the picture below.
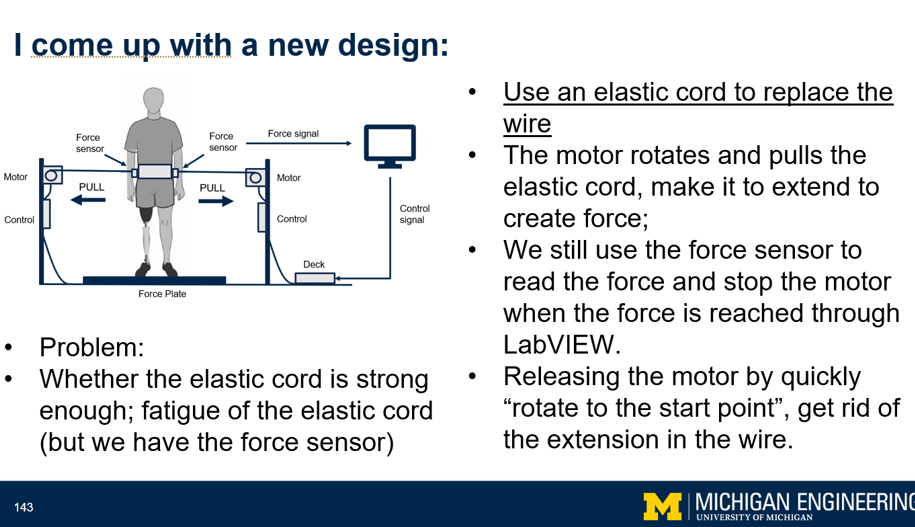
To solve this, I encountered a solution by replacing the wires with an elastic crop. In this case, we can stop the motor while the force "stored" in elasticity is enough. Later we changed to spring.
Once the idea came to my mind, I acted immediately.
I changed the settings and got the force plots as shown below:

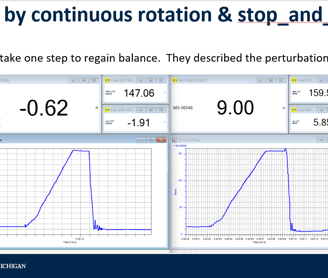
However, although the force applied was very large, people barely made small movements. They roughly take one crossover step. Then, an idea comes to my mind.
Then, I turned back to change the data we got from pulling manually. I figured out why the smaller force led the participant take two steps.
In this case, I figured out that using the motor we have recently to initiate a stable perturbation force in a more extended period is impossible. I need to search for a more reliable motor and control system. I am still working on that.